Stepper motor control panel for linear actuators

TL;DR
The video discusses controlling a stepper motor with a control panel and a new linear guide system.
Transcript
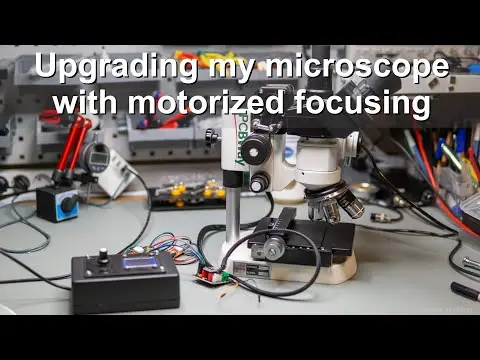
welcome everyone in this video i'm going to talk about stepper motor controlling again in this video i will continue one of my earlier projects where i made a stepper motor control panel which is basically this set of circuits here and now i got a new mechanism which is this linear guide here and i will talk about both things how i uh combine these... Read More
Key Insights
- 🧑🦼 The integration of a linear guide with a stepper motor enables smoother and more efficient project implementations, particularly in robotics and automation.
- 😥 Utilizing a limit switch not only enhances safety but also ensures precision in positioning by defining a zero reference point for movement.
- 👤 The ability to configure multiple parameters through a user interface empowers users to customize the functionality of the stepper motor, enhancing adaptability for various applications.
- 👨💻 Direct access to source code facilitates learning and the possibility for users to build upon the existing framework for their projects.
- 👻 The combination of hardware like the STM32 microcontroller and libraries allows for efficient control of complex motor functions, enabling more advanced project designs.
- 🎮 The demonstration of features like absolute vs. relative movement showcases the versatility of the control system, making it suitable for diverse scenarios.
- 👻 The careful optimization of the code to avoid blocking processes allows for continuous operation and responsiveness, enhancing the user experience.
Install to Summarize YouTube Videos and Get Transcripts
Explore YouTube Video Summarizer or Get YouTube Transcript Extractor
Questions & Answers
Q: What new functionality does the linear guide system introduce to the stepper motor control panel?
The linear guide system allows for smoother and more precise linear movement of the stepper motor. It enhances the control panel's capabilities, enabling the motor to navigate defined paths accurately. This is particularly useful for projects that require precision over longer distances, making it a versatile addition to the control setup.
Q: How does the limit switch improve the system’s accuracy?
The limit switch improves accuracy by serving as a physical endpoint for the carriage. When activated, it halts the motor and instructs the system to backtrack slightly, ensuring the limit switch is released before resetting the motor's position to zero. This process grants the control system a reliable reference point, enhancing overall movement precision.
Q: What options can be configured in the control panel's menu?
The control panel menu offers multiple configurations, such as adjusting the maximum speed of the carriage, setting acceleration values, and selecting between absolute and relative movement modes. Additional features include rotary movement control and predefined go-to positions, making the control system comprehensive for various applications.
Q: What programming tool or libraries are used for this project?
The project utilizes a combination of STM32 microcontroller with specific libraries such as the access stepper library for motor control and an LCD library for the display interface. These tools streamline coding and allow for effective management of the control panel's operations.
Q: Can the source code be accessed for personal projects?
Yes, the source code used in this project is available on the creator’s website. Viewers are encouraged to visit the site to access the code, wiring details, and other resources, enabling them to replicate or customize the controls for their own stepper motor applications.
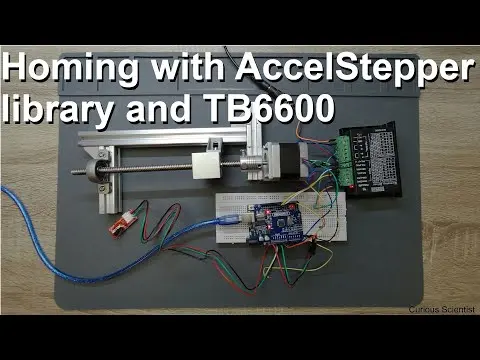
Q: How does the homing function work in the system?
The homing function moves the carriage towards the limit switch at a controlled speed. Once the limit switch is activated, it stops the motor and then reverses briefly to disengage the switch before setting the current position to zero. This establishes a reference point for future movements, ensuring accurate positioning.
Q: What features make the rotary encoder useful in this project?
The rotary encoder provides a user-friendly method for finely controlling the movement of the carriage. By rotating the encoder, users can adjust the position incrementally, which is ideal for applications requiring high precision. The encoder can also influence values in the menu and adjust settings dynamically.
Q: How is the speed and acceleration of the steeper motor managed?
The speed and acceleration of the stepper motor can be set via the control panel's menu options. Users can input desired values directly, and the corresponding parameters in the code manage the motor's performance based on these settings, allowing for tailored control depending on the task at hand.
Summary & Key Takeaways
-
The creator revisits their stepper motor control panel project, introducing a linear guide mechanism that improves the system's functionality and versatility.
-
A new limit switch feature enhances precision, ensuring reliable movement and position tracking by resetting the motor's zero position after it collides with the limit switch.
-
The video includes a detailed explanation of the software, including the source code used for the control panel, making it easier for viewers to implement similar systems.
Read in Other Languages (beta)
Share This Summary 📚
Summarize YouTube Videos and Get Video Transcripts with 1-Click
Try YouTube Summary with ChatGPT & Claude or YouTube Transcript Generator
Explore More Summaries from Curious Scientist 📚




Summarize YouTube Videos and Get Video Transcripts with 1-Click
Try YouTube Summary with ChatGPT & Claude or YouTube Transcript Generator