How to Solve Rotational Kinematics Problems Easily
TL;DR
To solve rotational kinematics problems, use essential equations like angular displacement equals angular velocity times time, and relate linear motion to angular motion through conversions. Familiarize yourself with equations for constant speed and acceleration, and understand how to translate angular distance into revolutions. Practicing examples will reinforce these concepts.
Transcript
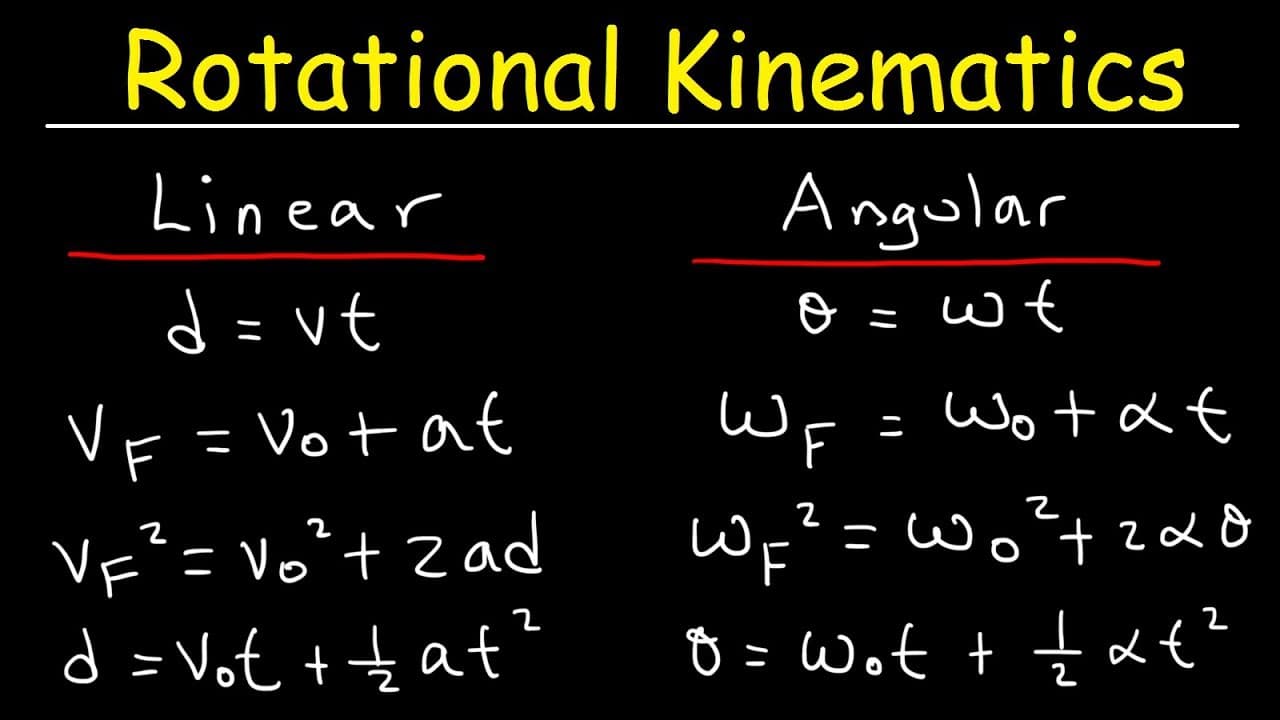
in this video we're going to talk about how to solve problems associated with rotational kinematics so let me give you a list of formulas that you need to know so on the left side we're going to put all of the linear equations that is associated with translational motion and on the right side all of the angular equations that's associated with rota... Read More
Key Insights
- 👂 The video provides a comprehensive list of equations for rotational kinematics, including those for constant speed and constant acceleration.
- 🐕🦺 Equations for converting angular distance to linear distance and vice versa are explained.
- 🎮 The video demonstrates practical problem-solving examples using the given equations.
- 📐 Understanding the differences between linear and angular equations is crucial for accurately solving rotational kinematics problems.
- 📐 The formulas given can be used to calculate angular speed, angular acceleration, revolutions, and linear distance in various scenarios.
- 🇦🇪 Proper unit conversions are necessary when solving problems that involve different units of measurement.
- 🎮 The video emphasizes the importance of knowing and applying the correct formulas for different types of rotational motion.
Install to Summarize YouTube Videos and Get Transcripts
Explore YouTube Video Summarizer or Get YouTube Transcript Extractor
Questions & Answers
Q: What are the differences between linear and angular equations in rotational kinematics?
In linear equations, we use variables such as distance (d), velocity (v), and acceleration (a), while in angular equations, we use angular displacement (θ), angular velocity (ω), and angular acceleration (α).
Q: How can we convert angular distance to revolutions and vice versa?
To convert angular distance to revolutions, divide the angle in radians by 2π. To convert revolutions to angular distance, multiply the number of revolutions by 2π.
Q: What equation can we use to calculate the final angular speed?
The equation is ω final = ω initial + αt, where ω represents angular speed (velocity) and α represents angular acceleration.
Q: How can we find the linear distance traveled by a rotating object?
The linear distance (arc length) can be found using the equation s = θr, where s is the linear distance, θ is the angular distance, and r is the radius.
Summary & Key Takeaways
-
The video provides a list of equations for translational and rotational motion, including displacement, velocity, acceleration, and time.
-
It demonstrates how to convert angular distance to revolutions and vice versa.
-
Multiple problem-solving examples are shown, including finding the number of revolutions and linear distance traveled.
Read in Other Languages (beta)
Share This Summary 📚
Summarize YouTube Videos and Get Video Transcripts with 1-Click
Try YouTube Summary with ChatGPT & Claude or YouTube Transcript Generator
Explore More Summaries from The Organic Chemistry Tutor 📚






Summarize YouTube Videos and Get Video Transcripts with 1-Click
Try YouTube Summary with ChatGPT & Claude or YouTube Transcript Generator