Reinforcement Learning Environment for Car Agent - Self-driving cars with Carla and Python p.3
TL;DR
This tutorial discusses the implementation of reinforcement learning, specifically deep Q-learning, with the Carla environment.
Transcript
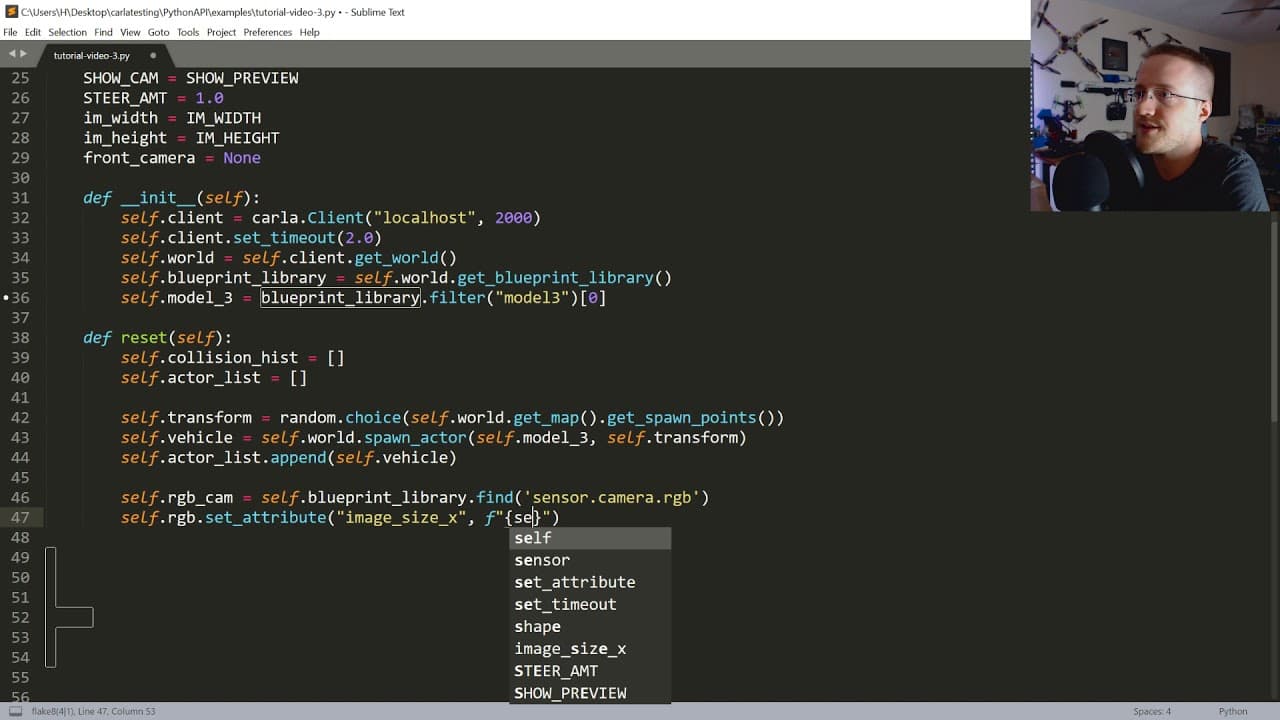
what's going on everybody and welcome to part 3 of the self-driving cars with Karla tutorials in this tutorial and the coming probably at least like two plus more we're gonna be talking about doing reinforcement learning specifically deep cue learning with the Karla environment now to do this we kind of have to change the architecture a little bit ... Read More
Key Insights
- ♻️ Reinforcement learning environments should follow a standard approach for ease of swapping different reinforcement learning models and environments.
- 😒 The Carla environment requires the use of object-oriented programming with specific methods like step and reset.
- 😀 Integration of sensors, such as the front-facing camera, can be done by creating sensor objects and attaching them to the vehicle.
- 💥 Collision detection is implemented by adding a collision sensor and recording collision events in a history list.
- 🐎 The agent's velocity is calculated to determine the reward based on the speed of the vehicle.
- ⛔ Episodes in the Carla environment can be limited in length to ensure training efficiency.
- 💨 Further optimization and research are needed to make the environment run faster and improve agent performance.
Install to Summarize YouTube Videos and Get Transcripts
Explore YouTube Video Summarizer or Get YouTube Transcript Extractor
Questions & Answers
Q: What is the standard approach for implementing reinforcement learning in environments?
The standard approach is to have a step method where actions are passed and information such as observations, rewards, and termination conditions are returned.
Q: What is the purpose of the reset method in reinforcement learning environments?
The reset method is used to initialize or restart the environment at the beginning of an episode.
Q: How is the front-facing camera of the Carla car accessed in the code?
The front-facing camera is accessed by creating an RGB camera sensor and attaching it to the vehicle. The sensor data is then processed to obtain the camera image.
Q: How is collision detection handled in the Carla environment?
A collision sensor is added to the environment, and collision events are recorded and stored in a collision history list. Collisions are checked in the step method to determine if the environment should be terminated.
Summary & Key Takeaways
-
The tutorial explains the importance of using the standard reinforcement learning environment approach for deep Q-learning.
-
The author walks through the process of setting up the Carla environment and implementing the necessary methods for reinforcement learning.
-
The tutorial also discusses the challenges of integrating sensors and handling collision detection in the Carla environment.
Read in Other Languages (beta)
Share This Summary 📚
Summarize YouTube Videos and Get Video Transcripts with 1-Click
Try YouTube Summary with ChatGPT & Claude or YouTube Transcript Generator
Explore More Summaries from sentdex 📚




Summarize YouTube Videos and Get Video Transcripts with 1-Click
Try YouTube Summary with ChatGPT & Claude or YouTube Transcript Generator