How to Use Carla and Python for Self-Driving Car Simulation
TL;DR
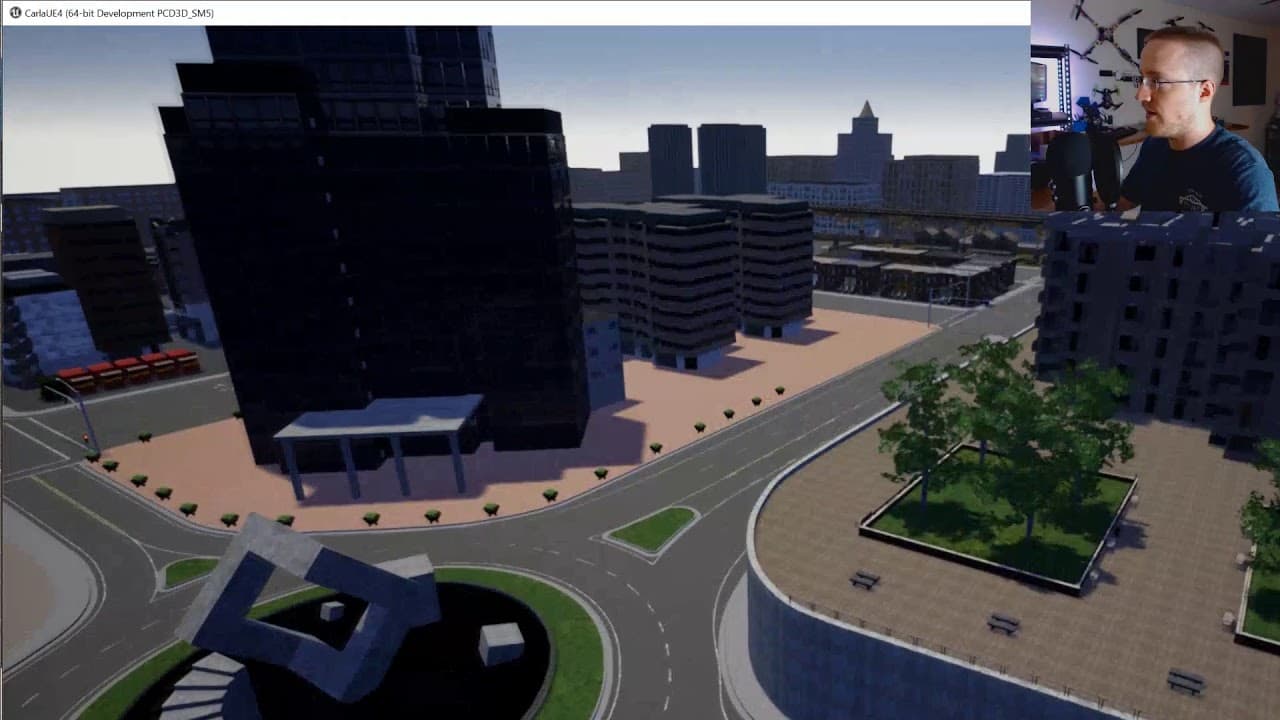
To use Carla with Python for self-driving car simulation, you need to install the Carla library, configure your environment, and use Python commands to run simulations. Carla allows for server-client connections, provides various sensors, and enables customization of scenarios like weather, making it ideal for training autonomous vehicles.
Transcript
what's going on everybody and welcome to a video slash tutorial on I'm just gonna be poking around the karla library thing if you're not familiar with Carl I don't imagine many of you guys are it's an open source simulator for autonomous driving research okay so basically what it does is creates a simulated environment specifically dedicated toward... Read More
Key Insights
- 👾 The Karla library is a specialized simulator for autonomous driving research, offering benefits over generic game engines like Grand Theft Auto.
- 👻 It allows for server-client connections, enabling multiple agents to be run simultaneously for efficient testing.
- 👨🔬 The library provides autonomous driving baselines, various sensors, and the ability to customize weather conditions, making it suitable for comprehensive research and development.
- 🧑🦽 Manual control features are available for users to interact with the simulation, supporting experimentation with different scenarios.
Install to Summarize YouTube Videos and Get Transcripts
Explore YouTube Video Summarizer or Get YouTube Transcript Extractor
Questions & Answers
Q: What is the Karla library and what is its purpose?
The Karla library is an open-source simulator designed for autonomous driving research. Its purpose is to provide a simulated environment for training self-driving cars.
Q: How does the Karla library differ from using Grand Theft Auto for autonomous driving training?
The Karla library offers advantages over using Grand Theft Auto as it is built specifically for autonomous driving research and provides an API for automated trial-and-error testing.
Q: Can you run multiple agents simultaneously in the Karla library?
Yes, the Karla library allows for server-client connections, enabling the user to run multiple agents at the same time.
Q: Does the Karla library provide any pre-built autonomous driving baselines?
Yes, the library offers autonomous driving baselines that users can explore to understand efficient and clean autonomous driving techniques.
Q: What kind of sensors are available in the Karla library?
The Karla library provides various sensors, including cameras and lidar, that can be used to collect data for autonomous driving tasks.
Q: Can the Karla library simulate different weather conditions?
Yes, the library allows users to change weather conditions, which is important for testing self-driving cars relying on camera sensors that can be affected by lighting conditions.
Q: Is it possible to control a vehicle in the Karla library manually?
Yes, the library provides a manual control feature where users can steer, accelerate, brake, and even toggle autonomous driving mode.
Q: Are there any limitations or challenges when using the Karla library?
Some challenges include GPU load on the server and client sides, and occasional issues with installing dependencies, but the library offers extensive documentation and tutorials to overcome them.
Summary & Key Takeaways
-
The Karla library is a dedicated simulator for training self-driving cars and offers benefits over using Grand Theft Auto.
-
The library allows for server-client connections, remote connection, and integration with the Robot Operating System.
-
It provides autonomous driving baselines, different sensors like cameras and lidar, and the ability to customize weather conditions.
Read in Other Languages (beta)
Share This Summary 📚
Summarize YouTube Videos and Get Video Transcripts with 1-Click
Try YouTube Summary with ChatGPT & Claude or YouTube Transcript Generator
Explore More Summaries from sentdex 📚




Summarize YouTube Videos and Get Video Transcripts with 1-Click
Try YouTube Summary with ChatGPT & Claude or YouTube Transcript Generator