
Automatically create requirements.txt
stackoverflow.com/questions/31684375/automatically-create-requirements-txt
Apr 18, 2023
1
What is the difference between devel and runtime tag for a Docker container?
stackoverflow.com/questions/56405159/what-is-the-difference-between-devel-and-runtime-tag-for-a-docker-container
Apr 18, 2023
3

脳ドックをWebから簡単に予約【スマート脳ドック】
smartdock.jp/
Apr 17, 2023
1
川口明弘の調整万年筆 powered by BASE
kaijapan.thebase.in/
Apr 16, 2023
1
How to add parameters in module class in pytorch custom model?
stackoverflow.com/questions/59234238/how-to-add-parameters-in-module-class-in-pytorch-custom-model
Apr 16, 2023
1

【PyTorch入門】第2回 autograd:自動微分 - Qiita
qiita.com/mananam/items/f4be3fb0d996a6a3eae3
Apr 16, 2023
1
Transformers-Tutorials/DPT at master · NielsRogge/Transformers-Tutorials
github.com/NielsRogge/Transformers-Tutorials/blob/master/DPT/DPT_inference_notebook_(depth_estimation).ipynb
Apr 16, 2023
DPT
huggingface.co/docs/transformers/main/model_doc/dpt
Apr 16, 2023
1

How to train a part of a network
discuss.pytorch.org/t/how-to-train-a-part-of-a-network/8923
Apr 16, 2023
1

プレゼンテーションタイトル - 001594627.pdf
www.mlit.go.jp/jidosha/content/001594627.pdf
Apr 15, 2023
1
000187197.pdf
www.mlit.go.jp/common/000187197.pdf
Apr 15, 2023
4

【元日銀→CEO】ビッグデータで物価を爆速解析!投資にも役立つ経済予測の最前線【後藤達也】 - YouTube
www.youtube.com/watch?v=b2jjmE3K9hk
Apr 15, 2023
1
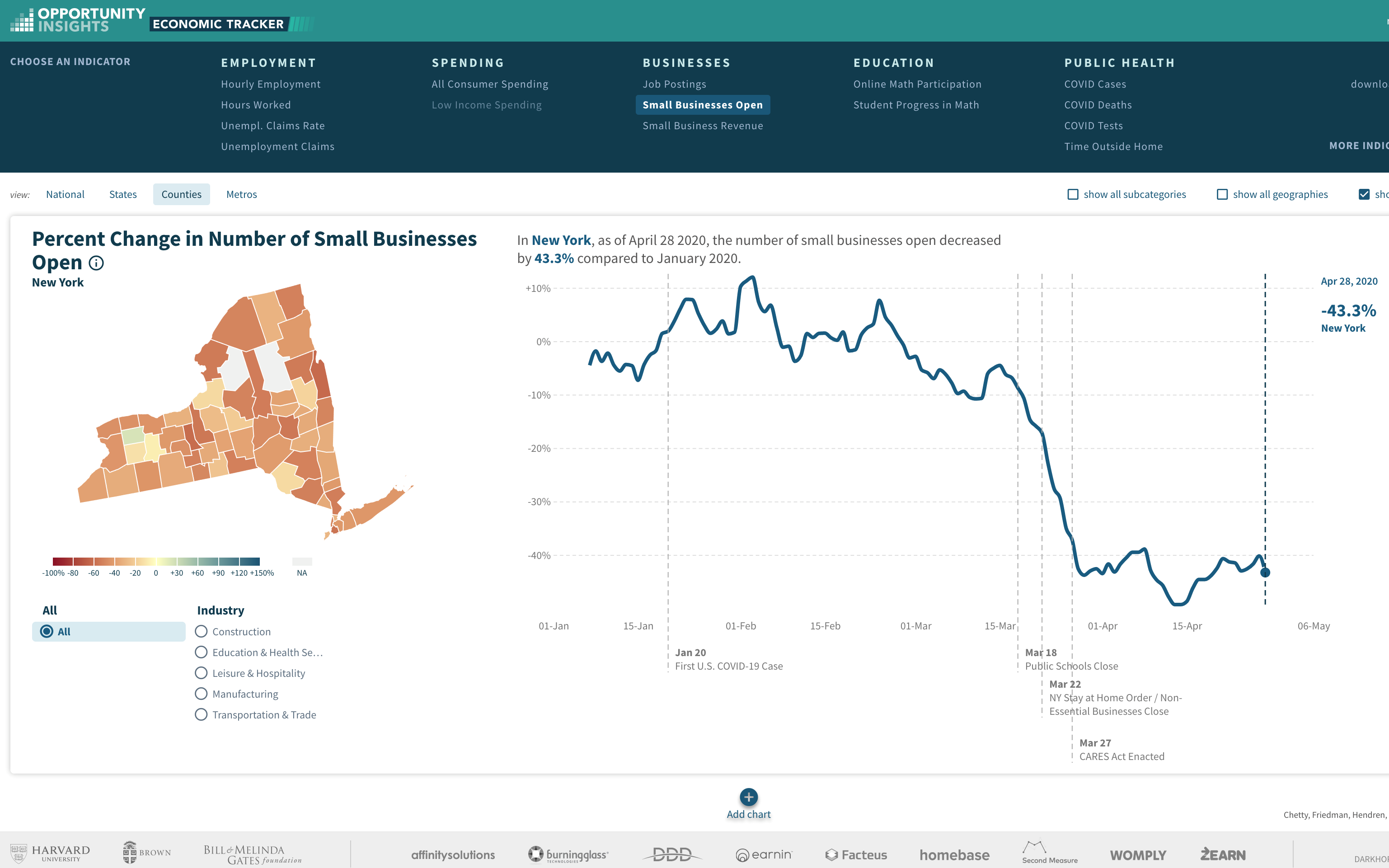
Opportunity Insights | Policy Solutions to the American Dream
opportunityinsights.org/
Apr 15, 2023

【ゆっくり解説】多様性の起源:種分化と新種の誕生【科学 / 進化】 - YouTube
www.youtube.com/watch?v=gbyma3diaGY
Apr 14, 2023
11
C言語による数値計算の基礎(1)
www.ritsumei.ac.jp/~kht23151/joho/unix11.html
Apr 14, 2023
1
OpenCVのチャンネルエラー対処: (-215:Assertion failed) (mtype == CV_8U || mtype == CV_8S) && _mask.sameSize(*psrc1) in function 'binary_op' | 404 motivation not found
tech-blog.s-yoshiki.com/entry/75
Apr 14, 2023
1

TorchVision Object Detection Finetuning Tutorial — PyTorch Tutorials 2.0.0+cu117 documentation
pytorch.org/tutorials/intermediate/torchvision_tutorial.html
Apr 13, 2023

ONNX to TF-Lite Model Conversion — MLTK 0.16.0 documentation
siliconlabs.github.io/mltk/mltk/tutorials/onnx_to_tflite.html
Apr 13, 2023
1
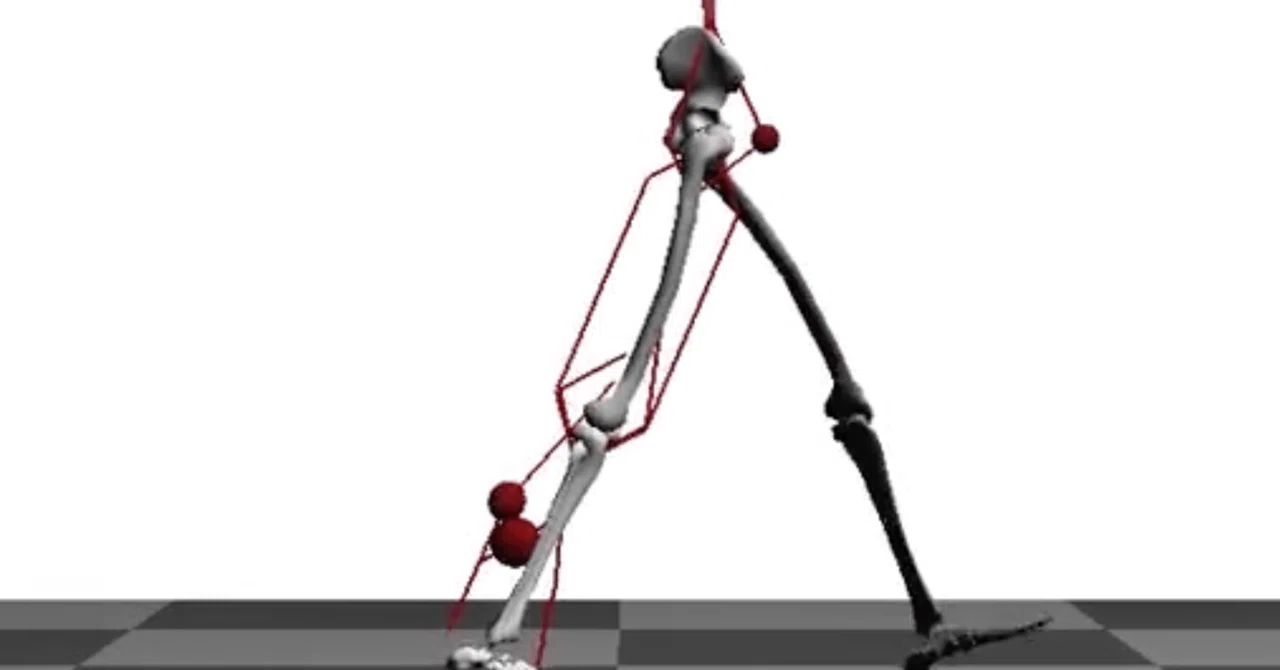
知能と身体の"共相転移"は起こるか|Ken Endo|note
note.com/kenendo/n/nc373c1d1a9d4
Apr 12, 2023
1
How can I use pdb (Python debugger) in Visual Studio Code IDE's debugger?
stackoverflow.com/questions/65677725/how-can-i-use-pdb-python-debugger-in-visual-studio-code-ides-debugger
Apr 12, 2023
1
koide3/direct_visual_lidar_calibration: A toolbox for target-less LiDAR-camera calibration [ROS1/ROS2]
github.com/koide3/direct_visual_lidar_calibration
Apr 12, 2023
1
3x4 Projection Matrix
homepages.inf.ed.ac.uk/rbf/CVonline/LOCAL_COPIES/EPSRC_SSAZ/node3.html
Apr 11, 2023
1

アフィン変換(平行移動、拡大縮小、回転、スキュー行列)
imagingsolution.net/imaging/affine-transformation/
Apr 11, 2023
1
CSE252C_20170522.pdf
cseweb.ucsd.edu/classes/sp17/cse252C-a/CSE252C_20170522.pdf
Apr 11, 2023
1

Spatial Transformer Networks Tutorial — PyTorch Tutorials 2.0.0+cu117 documentation
pytorch.org/tutorials/intermediate/spatial_transformer_tutorial.html
Apr 11, 2023
2
Torantulino/Auto-GPT: An experimental open-source attempt to make GPT-4 fully autonomous.
github.com/Torantulino/Auto-GPT?utm_source=www.therundown.ai&utm_medium=newsletter&utm_campaign=how-ai-would-destroy-humanity
Apr 10, 2023
1

numpy.random.Generator.choice — NumPy v1.24 Manual
numpy.org/doc/stable/reference/random/generated/numpy.random.Generator.choice.html
Apr 10, 2023
2

M1 MacでUTMを用いてUbuntu18.04を動かす方法 - Qiita
qiita.com/doraryu1/items/f79ab67b4c7b060a0917
Apr 9, 2023
2
On Mac M1 Big Sur/Parallels 16 Install Ubuntu 18.04 Server ARM64 failed.
forum.parallels.com/threads/on-mac-m1-big-sur-parallels-16-install-ubuntu-18-04-server-arm64-failed.353695/
Apr 9, 2023
1
dvanoni/notero: A Zotero plugin for syncing items into Notion
github.com/dvanoni/notero
Apr 9, 2023
1
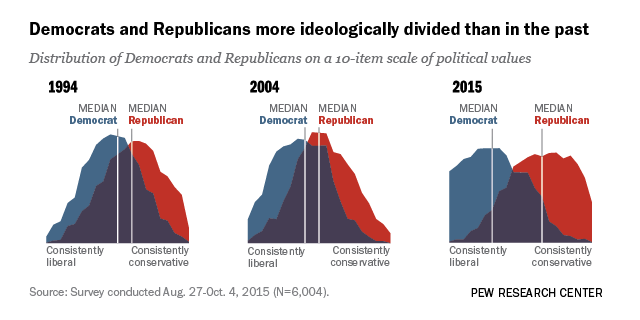
A Wider Ideological Gap Between More and Less Educated Adults
www.pewresearch.org/politics/2016/04/26/a-wider-ideological-gap-between-more-and-less-educated-adults/
Apr 9, 2023
1
alexklwong/calibrated-backprojection-network: PyTorch Implementation of Unsupervised Depth Completion with Calibrated Backprojection Layers (ORAL, ICCV 2021)
github.com/alexklwong/calibrated-backprojection-network/blob/master/setup/setup_dataset_nyu_v2.py
Apr 8, 2023
11
calibrated-backprojection-network/net_utils.py at 51540145f2065cca88e087a91ad72a460b1018c3 · alexklwong/calibrated-backprojection-network
github.com/alexklwong/calibrated-backprojection-network/blob/51540145f2065cca88e087a91ad72a460b1018c3/src/net_utils.py
Apr 8, 2023
3
calibrated-backprojection-network/net_utils.py at 440f3ded678fc11c86b0c1fd3f5914c0713c607e · alexklwong/calibrated-backprojection-network
github.com/alexklwong/calibrated-backprojection-network/blob/440f3ded678fc11c86b0c1fd3f5914c0713c607e/src/net_utils.py
Apr 8, 2023
1
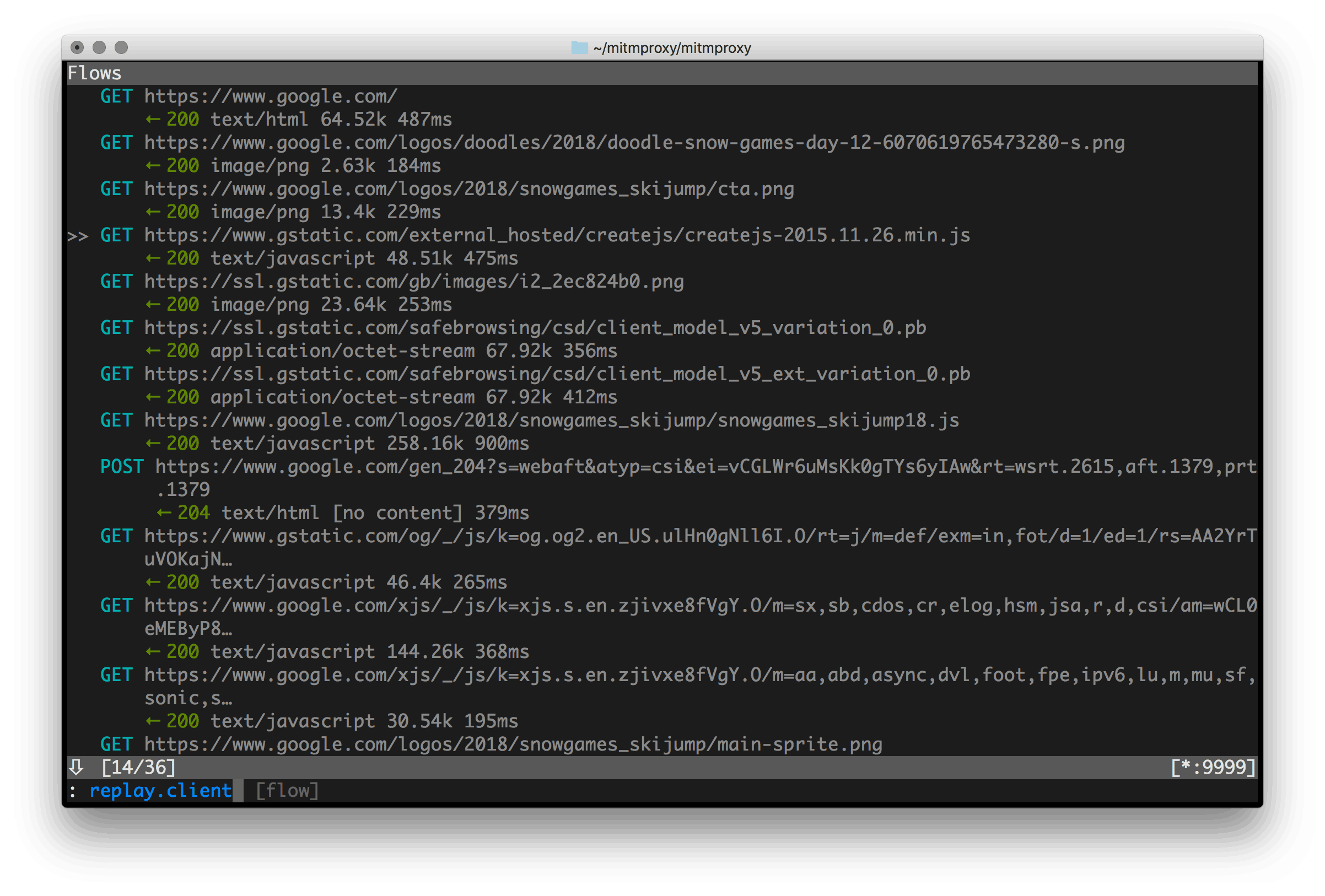
mitmproxy - an interactive HTTPS proxy
mitmproxy.org/
Apr 8, 2023
1
mitmproxy/mitmproxy: An interactive TLS-capable intercepting HTTP proxy for penetration testers and software developers.
github.com/mitmproxy/mitmproxy
Apr 8, 2023
1
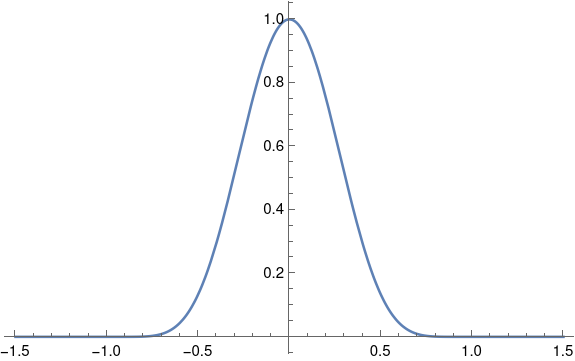
Bump functions
www.johndcook.com/blog/2022/06/23/bump-functions/
Apr 8, 2023
1
alexklwong/awesome-state-of-depth-completion: Current state of supervised and unsupervised depth completion methods
github.com/alexklwong/awesome-state-of-depth-completion
Apr 7, 2023
1

【有意差はつくれる】※本当は教えたくない※エビデンスをハッキングする方法 - YouTube
www.youtube.com/watch?v=IY_v1LzwBRU
Apr 7, 2023
1

Notes on the GPT-4 abbreviations tweet
gist.github.com/VictorTaelin/d293328f75291b23e203e9d9db9bd136
Apr 7, 2023
1
jsvine/pdfplumber: Plumb a PDF for detailed information about each char, rectangle, line, et cetera — and easily extract text and tables.
github.com/jsvine/pdfplumber
Apr 6, 2023
1
pdfannots/pdfannots.py at main · 0xabu/pdfannots
github.com/0xabu/pdfannots
Apr 6, 2023
1
Differentiating where operator
discuss.pytorch.org/t/differentiating-where-operator/59706
Apr 5, 2023
1
Custom Loss Function With Loops
discuss.pytorch.org/t/custom-loss-function-with-loops/161852/2
Apr 4, 2023
3
How to Write Good Commit Messages: A Practical Git Guide
www.freecodecamp.org/news/writing-good-commit-messages-a-practical-guide/
Apr 4, 2023
1
torch.histogramdd — PyTorch 2.0 documentation
pytorch.org/docs/stable/generated/torch.histogramdd.html
Apr 4, 2023
11

Docker一強の終焉にあたり、押さえるべきContainer事情
zenn.dev/ttnt_1013/articles/f36e251a0cd24e
Apr 3, 2023
7
numpy.histogramdd — NumPy v1.24 Manual
numpy.org/doc/stable/reference/generated/numpy.histogramdd.html
Apr 3, 2023
1

Consumer Products-Hengzhi Future (Chongqing) Innovation Technology Co., Ltd.
www.hengbot.com/xfjcp
Apr 3, 2023
1
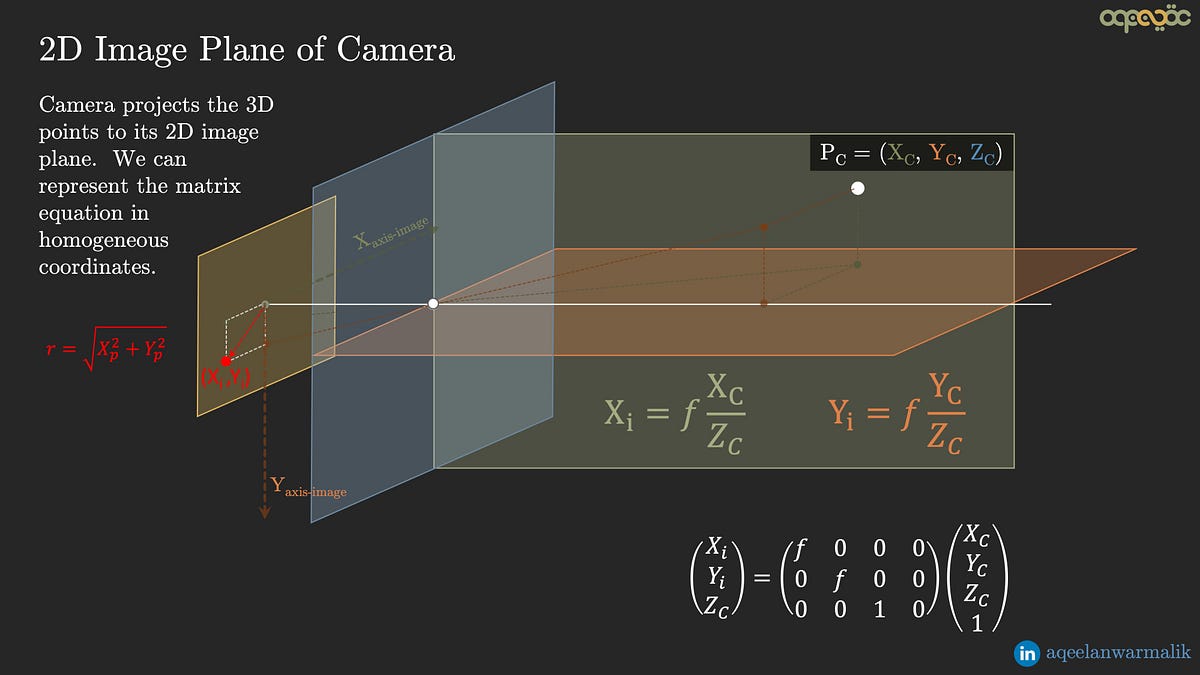
What are Intrinsic and Extrinsic Camera Parameters in Computer Vision?
towardsdatascience.com/what-are-intrinsic-and-extrinsic-camera-parameters-in-computer-vision-7071b72fb8ec
Apr 2, 2023