
【神秘の比率】黄金比はウツクシイか? Φをめぐる真実 | ガリレオX 第97回 - YouTube
www.youtube.com/watch?v=nt4z8WAIB08
Jan 25, 2023
1

竹内一将 (Kazumasa A. Takeuchi) on Twitter
twitter.com/oh_la_la_kazz/status/1618206090172461056
Jan 25, 2023
2
.png)
【図解】音楽配信と動画配信、収益力が高いのは?SpotifyとNETFLIXの比較からコンテンツ配信ビジネスを解説
navi.funda.jp/article/spotify
Jan 25, 2023
8

cpd_yoko.pdf
www.jsps.go.jp/j-pd/data/boshu/cpd_yoko.pdf
Jan 25, 2023
2
boshuyoko.pdf
www.jsps.go.jp/j-pd/pd-koyou/data/boshuyoko.pdf
Jan 25, 2023
5
PowerPoint プレゼンテーション - hikaku.pdf
www.jsps.go.jp/j-pd/pd-koyou/data/hikaku.pdf
Jan 25, 2023
3

研究環境向上のための若手研究者雇用支援事業 | 特別研究員|日本学術振興会
www.jsps.go.jp/j-pd/pd-koyou/
Jan 25, 2023
2
Quick example of how to serialize then deserialize a ROS msg in python 3
gist.github.com/PeterMitrano/7daa8a993d7d05bd6f440daff7299f6a
Jan 25, 2023
1

The next generation of US nuclear plants could be tiny but powerful
www.popsci.com/technology/small-modular-nuclear-reactor-approval/
Jan 25, 2023
1

知られざるクラゲの世界 〜不老不死からノーベル賞まで〜 | ガリレオX 第178回 - YouTube
www.youtube.com/watch?v=cXiSyu4KC1g
Jan 25, 2023
1

I Built a Sports Betting Bot with ChatGPT - YouTube
www.youtube.com/watch?v=IDthta5sUGQ
Jan 25, 2023
1

【連載】 第1期生の卒業生が語るOISTのこと: 2012~2019|濱田太陽|note
note.com/hirotaiyohamada/n/n03cd36f694aa?utm_source=pocket_reader
Jan 24, 2023
1

How companies greenwash their plastic pollution
www.popsci.com/environment/plastic-greenwashing-recycle/?utm_source=pocket_reader
Jan 23, 2023
2
旅券法令改正及び旅券(パスポート)の電子申請の開始について
www.mofa.go.jp/mofaj/ca/pss/page22_003958.html
Jan 23, 2023
1

「イーロン・マスクに社員が直接質問」「プロジェクトは自分で選ぶ」 テスラが開発チームにあえてリーダーを置かない理由
logmi.jp/tech/articles/327164
Jan 22, 2023
6
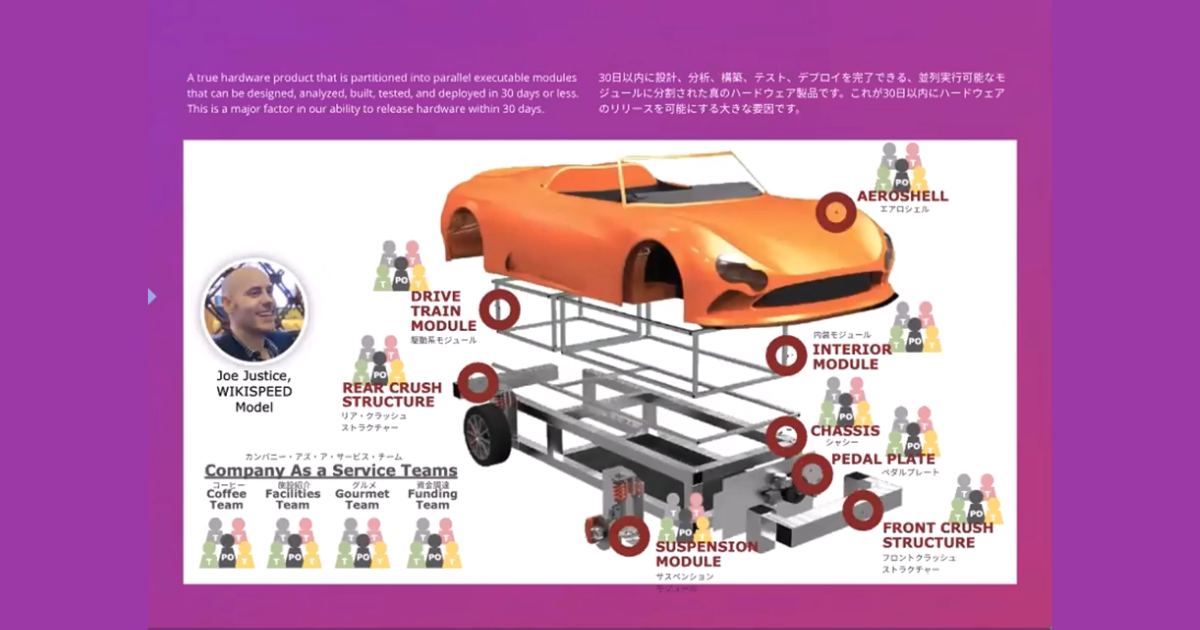
あなたが学んだアジャイルとテスラの手法は何が違うのか? 認定スクラムトレーナーが語る、テスラの真の凄さ
logmi.jp/tech/articles/327160?utm_source=pocket_saves
Jan 22, 2023
4
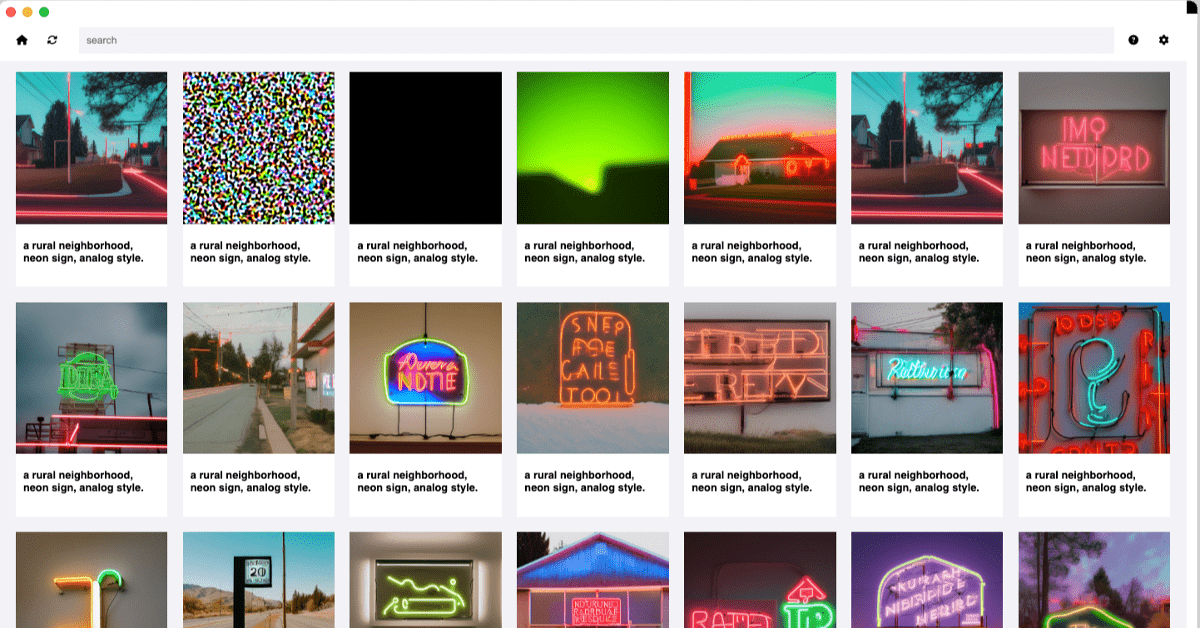
Emulate NovelAI · Discussion #2017 · AUTOMATIC1111/stable-diffusion-webui
github.com/AUTOMATIC1111/stable-diffusion-webui/discussions/2017?utm_source=pocket_saves
Jan 22, 2023

Research Fellowship — Dubai Future Foundation
www.dubaifuture.ae/research-fellowship-2
Jan 22, 2023
Deephome/Awesome-LiDAR-Camera-Calibration: A Collection of LiDAR-Camera-Calibration Papers, Toolboxes and Notes
github.com/Deephome/Awesome-LiDAR-Camera-Calibration?utm_source=pocket_reader
Jan 22, 2023
Huguet57/LIMO-Velo: A real-time, direct and tightly-coupled LiDAR-Inertial SLAM for high velocities with spinning LiDARs
github.com/Huguet57/LIMO-Velo?utm_source=pocket_reader
Jan 22, 2023

NVIDIA Optical Flow SDK
developer.nvidia.com/opticalflow-sdk?utm_source=pocket_reader
Jan 22, 2023

DockerでのディープラーニングGPU学習環境構築方法 - Qiita
qiita.com/karaage0703/items/e79a8ad2f57abc6872aa?utm_source=pocket_reader
Jan 22, 2023
4
google-research/tuning_playbook: A playbook for systematically maximizing the performance of deep learning models.
github.com/google-research/tuning_playbook
Jan 22, 2023
32
JalaliLabUCLA/phycv: PhyCV: The First Physics-inspired Computer Vision Library
github.com/JalaliLabUCLA/phycv
Jan 22, 2023
5

買って良かったものランキングと称して単体で動画にするほどでもない商品を一斉に紹介していこうのコーナー (2022) - YouTube
www.youtube.com/watch?v=sN1ZgcW5_8Q
Jan 21, 2023
2
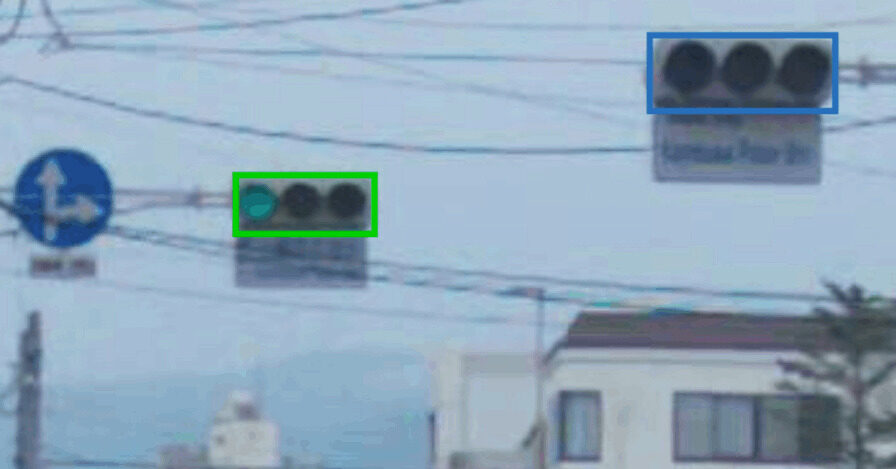
打倒テスラのTURING、完全自動運転へ「AI信号認識」技術
jidounten-lab.com/u_39396
Jan 21, 2023
3

Eugene Dyabin (@EugeneDyabin) / Twitter
twitter.com/EugeneDyabin?ref_src=twsrc%5Egoogle%7Ctwcamp%5Eserp%7Ctwgr%5Eauthor
Jan 21, 2023
1

Cascadeur - the easiest way to animate AI-assisted keyframe animation software
cascadeur.com/
Jan 21, 2023
1

Ventana RISC-V CPUs Beating Next Generation Intel Sapphire Rapids! – Overview of 13 RISC-V Companies, CPUs, and Ecosystem
www.semianalysis.com/p/ventana-risc-v-cpus-beating-next
Jan 21, 2023
3

Welcome to Malbers Animations Assets - Animal Controller
malbersanimations.gitbook.io/animal-controller/
Jan 21, 2023
1

Media Tweets by MalberS Animations (@MalberShark) / Twitter
twitter.com/MalberShark/media
Jan 21, 2023
1
Breadboard Manual
breadboard.me/docs/?utm_source=pocket_saves
Jan 21, 2023

水銀はなぜ液体なのか?【物質に潜む相対論的効果】 - YouTube
www.youtube.com/watch?v=G564HXeskLI
Jan 20, 2023
1

【ラーメン2000円】人はなぜラーメン屋にいくのか理詰めで解説します - YouTube
www.youtube.com/watch?v=v2UIN3sDSxs
Jan 20, 2023
2

andite/anything-v4.0 · Hugging Face
huggingface.co/andite/anything-v4.0
Jan 19, 2023
flat/installation-ja.md at main · ddPn08/flat
github.com/ddPn08/flat
Jan 19, 2023

PhD training is no longer fit for purpose — it needs reform now
www.nature.com/articles/d41586-023-00084-3
Jan 19, 2023
1

How to Ask Good Questions: 5 Ways to Discover the Truth
themindcollection.com/how-to-ask-good-questions/
Jan 19, 2023
2
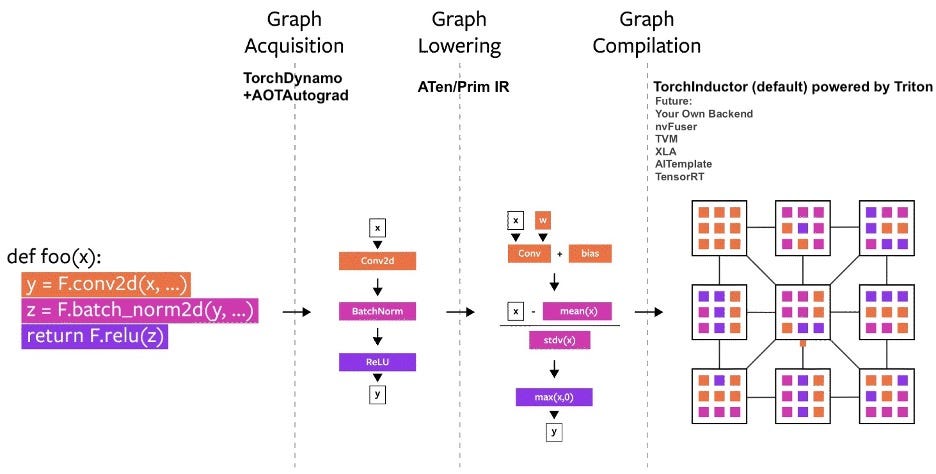
How Nvidia’s CUDA Monopoly In Machine Learning Is Breaking - OpenAI Triton And PyTorch 2.0
www.semianalysis.com/p/nvidiaopenaitritonpytorch
Jan 19, 2023
17
Learn In Public: The fastest way to learn
www.swyx.io/learn-in-public/
Jan 18, 2023
1

Ivy - The Unified Machine Learning Framework
lets-unify.ai/
Jan 17, 2023

Facing inflation: lab heads tighten supplies budgets
www.nature.com/articles/d41586-023-00088-z
Jan 16, 2023
1

gsdf/Counterfeit-V2.0 · Hugging Face
huggingface.co/gsdf/Counterfeit-V2.0
Jan 16, 2023
About — Springbok Analytics
www.springbokanalytics.com/about
Jan 15, 2023
1

Applied Biomechanics Researcher at Apple | The Muse
www.themuse.com/jobs/apple/applied-biomechanics-researcher-19e1b4
Jan 15, 2023
2

VSCodeでモダンなC++開発環境構築(CMakeとclang-format編)
zenn.dev/kiraemon/articles/ce8ca63f1a7a58
Jan 15, 2023
1

VSCodeでモダンなC++開発環境構築(Dev Containers編)
zenn.dev/kiraemon/articles/df3c9aedfc3c13
Jan 15, 2023
1

銀河英雄伝説解説動画第12回後編それぞれの陣営における人材育成の課題【霊夢&魔理沙&妖夢】 - YouTube
www.youtube.com/watch?v=10DTNsC_xPQ
Jan 15, 2023
3
Mammal's Locomotion-3rd version
mammals-locomotion.com/?utm_source=pocket_saves
Jan 15, 2023